Dados de Área
Aula 04: Teoria e Prática em R
Alex Monito Nhancololo
Instituto de Matemática, Estatística e Ciência da Computação (IME‑USP)
26/01/2026
Definição e Conceitos Fundamentais
O que são Dados de Área?
\(\Longrightarrow\) Domínio Discreto (\(D^L\)) vs. Contínuo (\(D^G\))
Def.: Processos estocásticos onde o domínio espacial é fixo, discreto e contável (Cressie; Moores, 2022).
Unidades: Observações ancoradas em unidades espaciais predefinidas e não sobrepostas (ex: municípios, pixels, zonas censitárias).
Incerteza: Reside no atributo \(Y(\mathbf{s}_i)\), pois a localização \(\mathbf{s}_i\) é fixa.
Vetor de observações: \(\mathbf{y} = (y_1, \dots, y_n)^\top\).
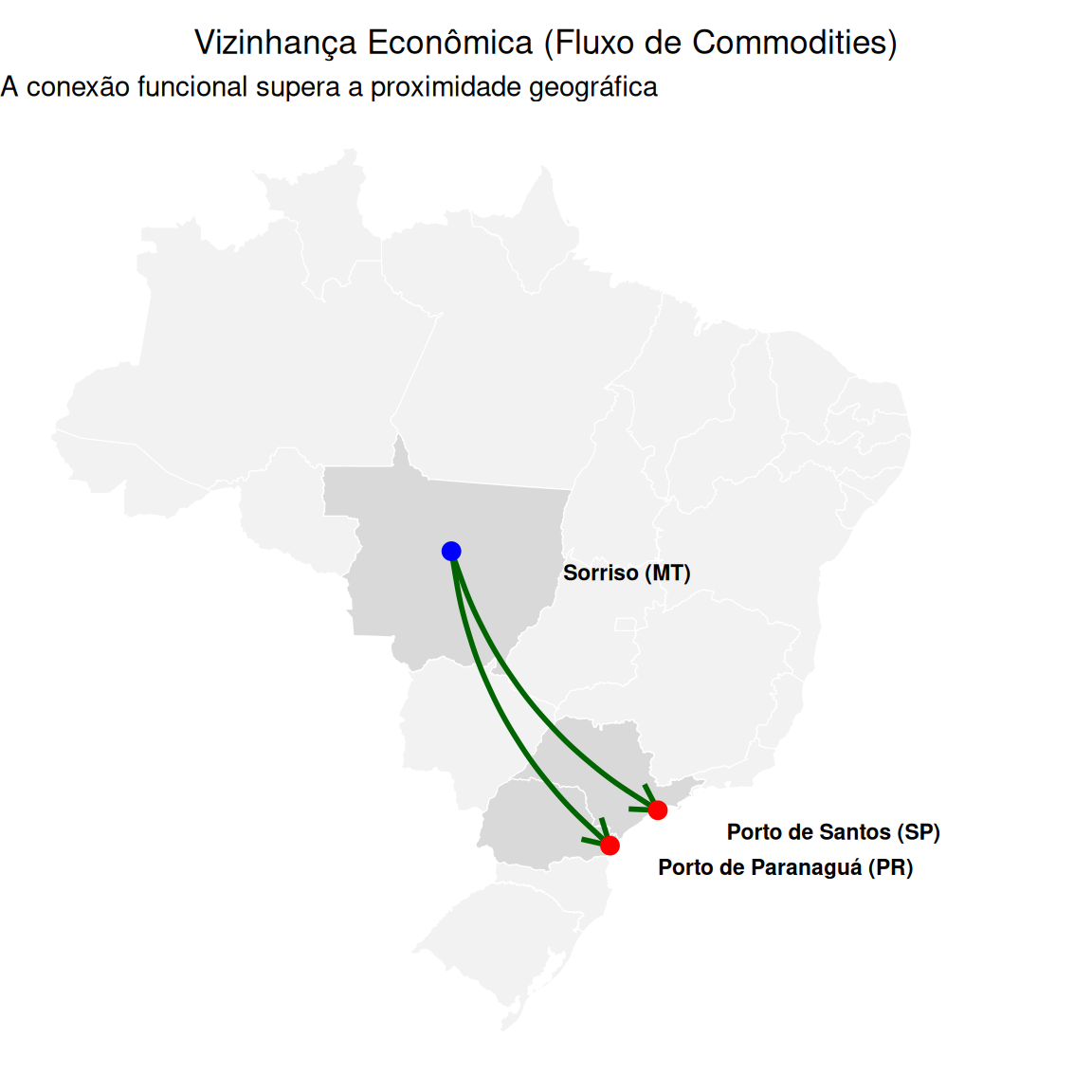
Dependência: Governada pela topologia/vizinhança, não necessariamente pela distância euclidiana contínua (Besag, 1974).
Estruturas de Vizinhança (\(\mathbf{W}\))
Matriz \(\mathbf{W}\)
\(\Longrightarrow\) Quantificando a conexão espacial
\[ \mathbf{W}_{n \times n} = \begin{bmatrix} w_{11} & w_{12} & \cdots & w_{1n} \\ w_{21} & w_{22} & \cdots & w_{2n} \\ \vdots & \vdots & \ddots & \vdots \\ w_{n1} & w_{n2} & \cdots & w_{nn} \end{bmatrix} \]
\(w_{ij}\): Conexão entre \(j\) e \(i\).
Convenção: \(w_{ii} = 0\) (sem auto-conexão) (Anselin, 2001).
Feedback Espacial: Diferente de séries temporais, a dependência é multidirecional (\(i \leftrightarrow j \leftrightarrow k\)).
Critério de vizinhança
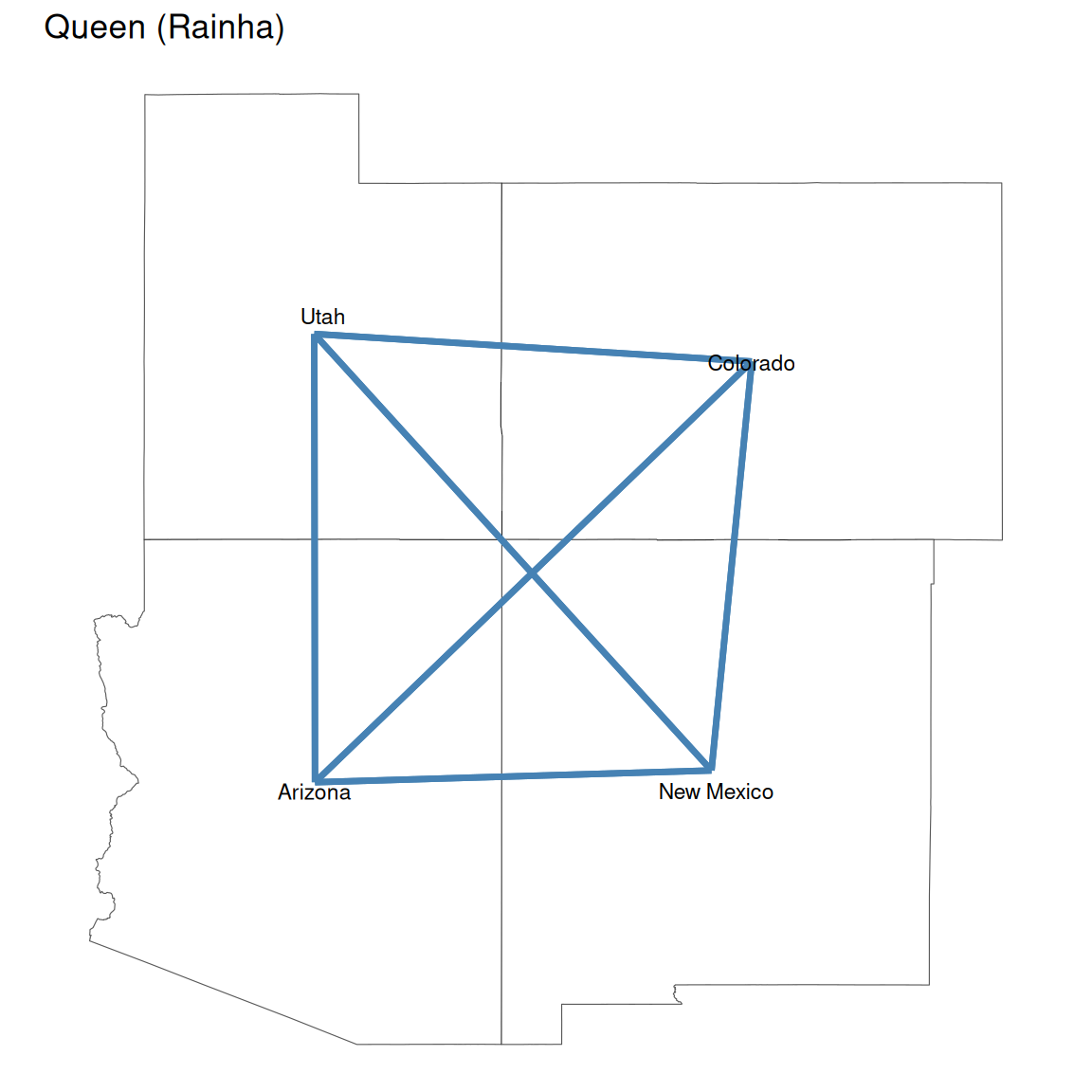
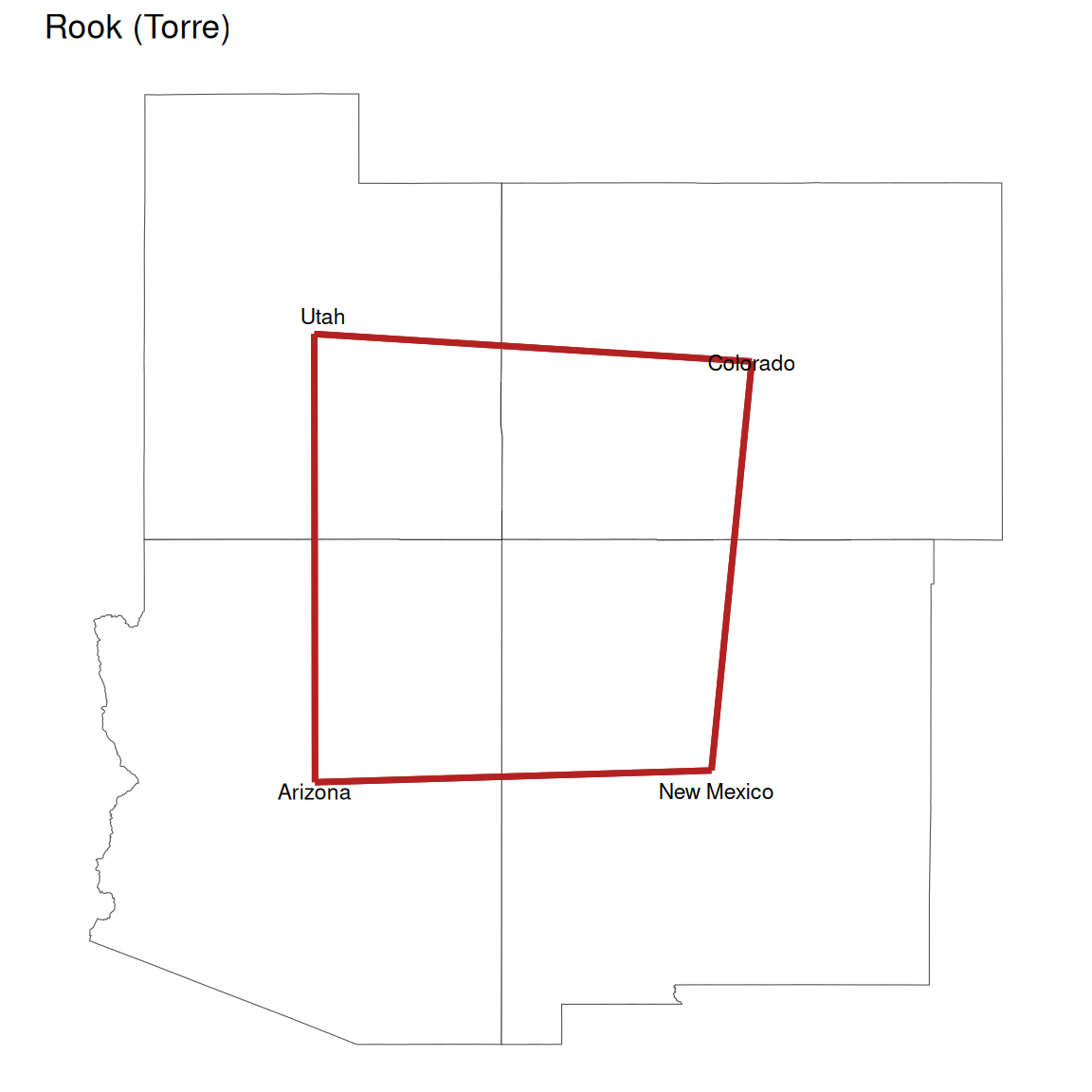
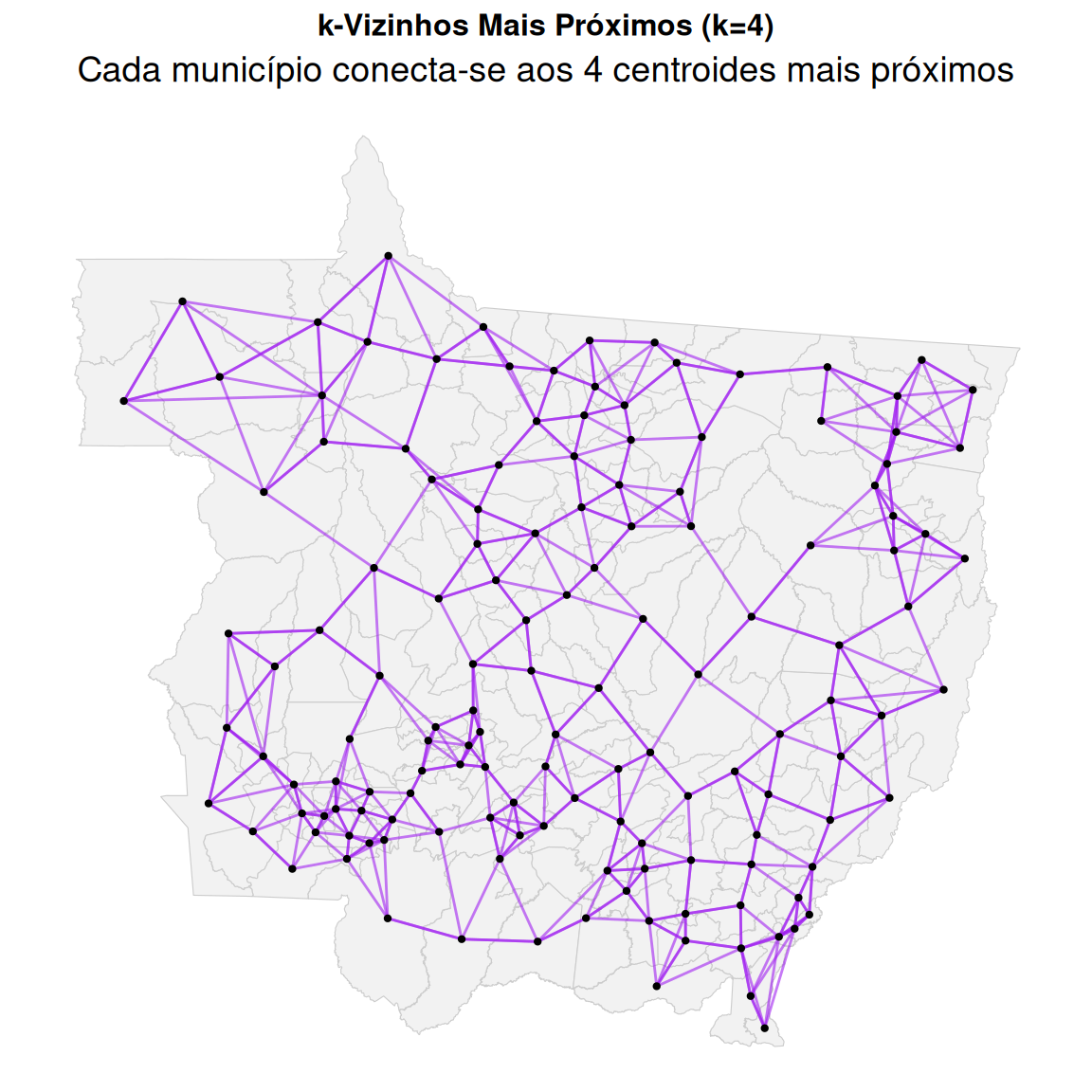
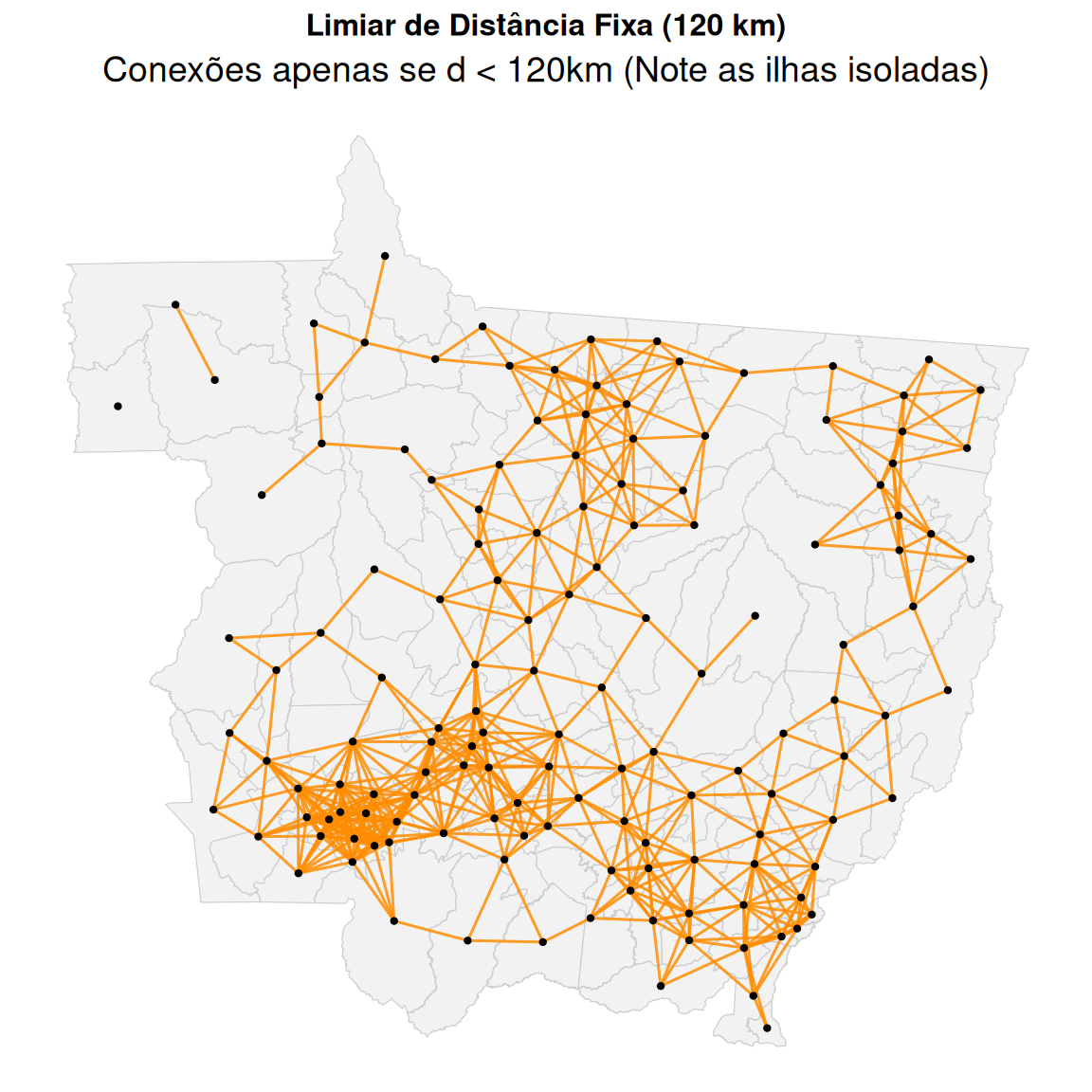
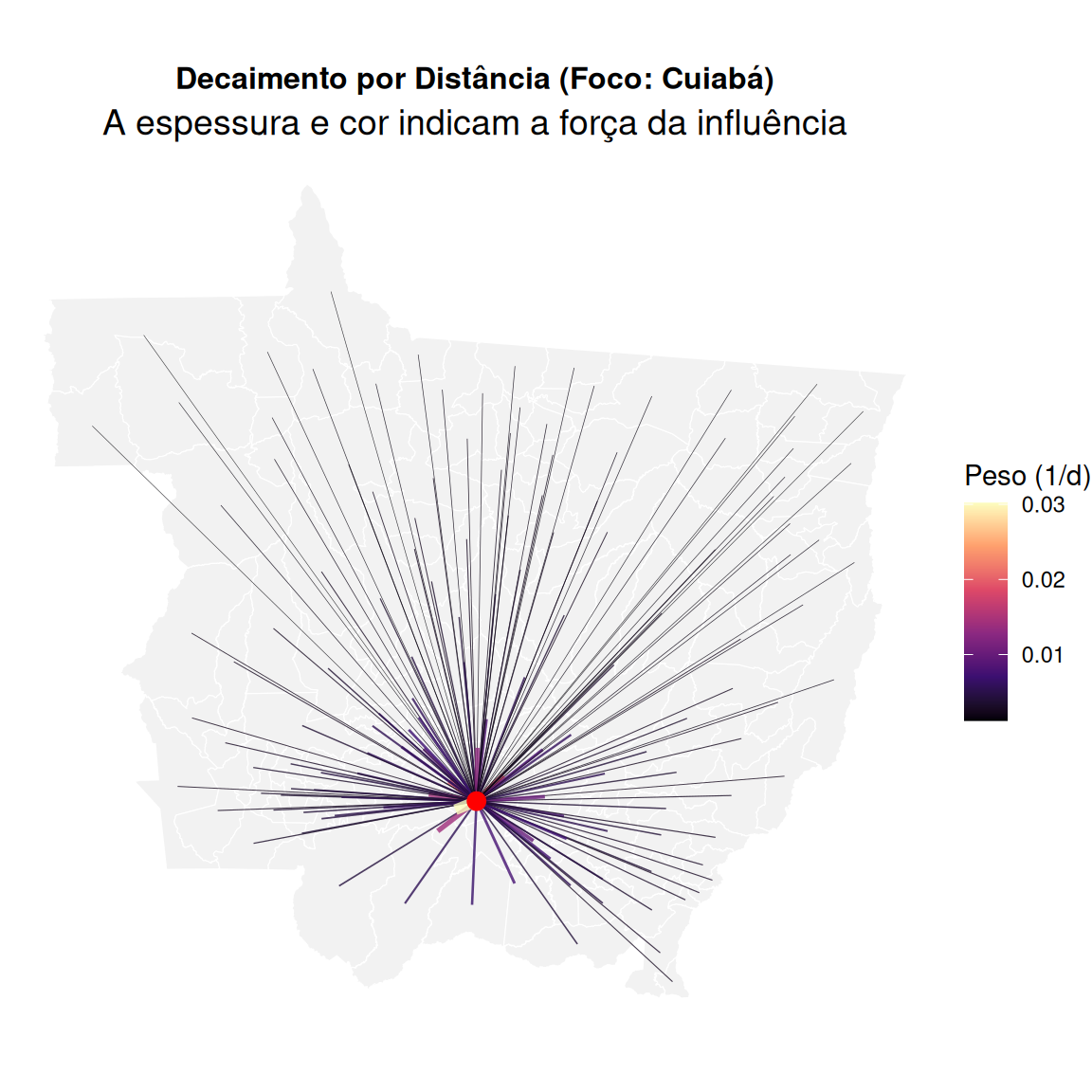
Nota: Relaia o conteúdo da aula 01, parte de vizinhança
Matriz de Pesos e Normalização
\(\Longrightarrow\) Por que transformar a matriz binária?
A matriz \(\mathbf{W}\) binária (0 ou 1) reflete apenas a existência de conexão.
A escolha dos pesos deve ser teórica e definida a priori (Kelejian; Piras, 2017).
Em modelos espaciais, a matriz \(( \mathbf{I} - \rho \mathbf{W} )\) precisa ser invertível.
Sem normalização, autovalores (\(\lambda\)) explodem, dificultando a estimação de \(\rho\) e a interpretação numérica.
Tipos de Normalização
\[w_{ij}^{r} = \frac{w_{ij}}{\sum_{j=1}^n w_{ij}}\]
\[ \small \mathbf{W} = \begin{bmatrix} 0 & 1 & 1 \\ 1 & 0 & 0 \\ 1 & 0 & 0 \end{bmatrix} \rightarrow \mathbf{W}^{r} = \begin{bmatrix} 0 & 0.5 & 0.5 \\ 1 & 0 & 0 \\ 1 & 0 & 0 \end{bmatrix} \]
\[w_{ij}^{c} = \frac{w_{ij}}{\sum_{i=1}^n w_{ij}}\]
\[ \small \mathbf{W} = \begin{bmatrix} 0 & 1 & 1 \\ 1 & 0 & 0 \\ 1 & 0 & 0 \end{bmatrix} \rightarrow \mathbf{W}^{c} = \begin{bmatrix} 0 & 1 & 1 \\ 0.5 & 0 & 0 \\ 0.5 & 0 & 0 \end{bmatrix} \]
\[\mathbf{W}^{spectral} = \frac{\mathbf{W}^0}{\lambda_{max}}\]
Análise Exploratória de Dados Espaciais (ESDA)
O que é ESDA?
Segundo Anselin (1995), é um conjunto de técnicas para:
Descrever e visualizar distribuições espaciais.
Identificar atípicos (spatial outliers).
Detectar padrões de associação (clusters).
Sugerir regimes de heterogeneidade espacial.
O objetivo é quantificar a dependência definida por \(\mathbf{W}\).
Estatísticas globais de autocorrelação
\(\Longrightarrow\) Da correlação à autocorrelação
\(\Longrightarrow\) Associação linear entre duas variáveis distintas (\(X\) e \(Y\)).
\[ r = \frac{\text{Cov}(X, Y)}{\sigma_X \sigma_Y} = \frac{\sum_{i=1}^n (x_i - \bar{x})(y_i - \bar{y})}{\sqrt{\sum (x_i - \bar{x})^2} \sqrt{\sum (y_i - \bar{y})^2}} \]
Como \(X\) varia em relação a \(Y\) na mesma unidade \(i\).
Assume-se que os pares \((x_i, y_i)\) são independentes entre si (i.i.d).
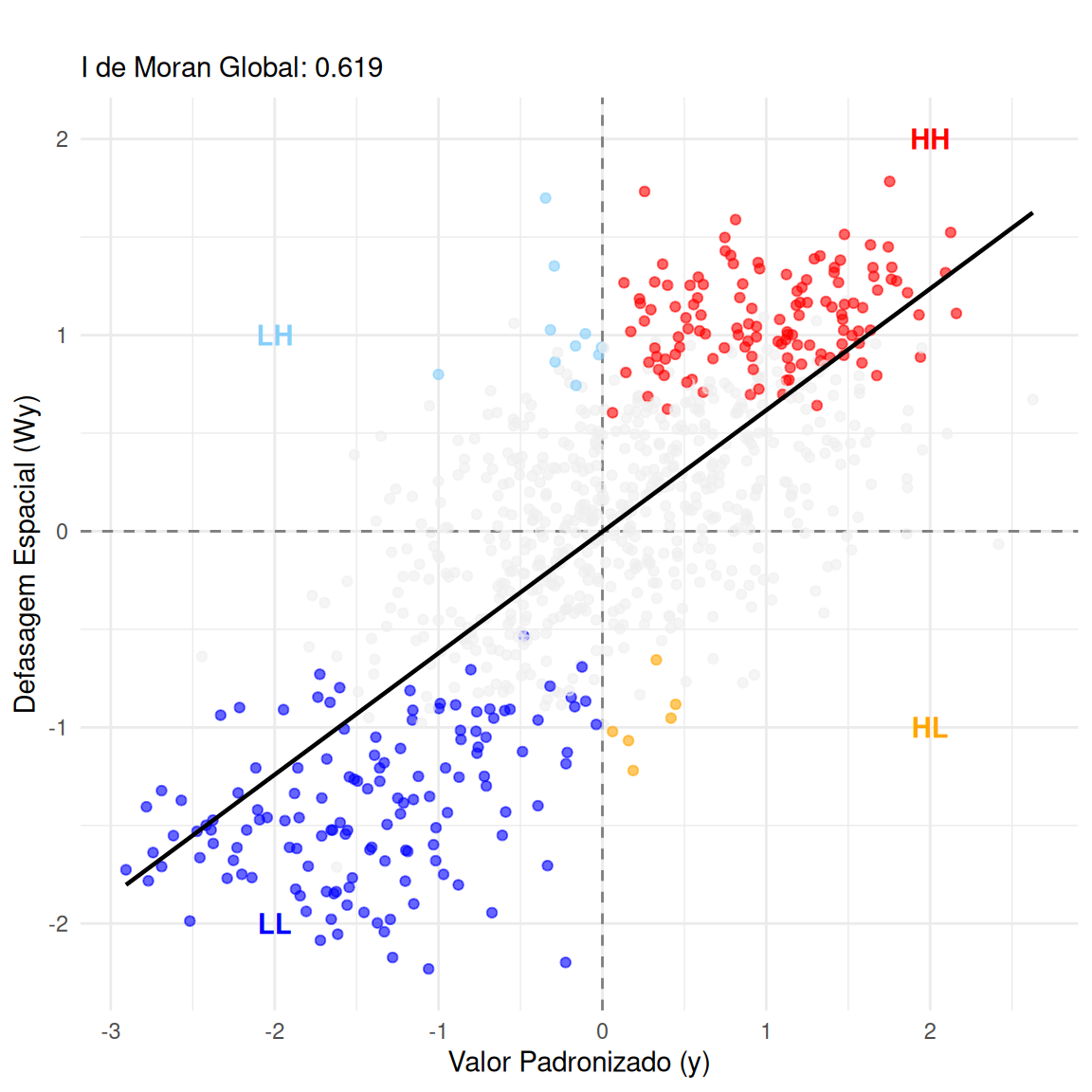
\(\Longrightarrow\) Associação linear de uma variável (\(Y\)) com ela mesma no espaço.
Na estatística espacial, não temos um \(X\) e um \(Y\) distintos. Temos apenas \(Y\) em locais diferentes.
Para medir a correlação de \(Y\) consigo mesma, substituímos a segunda variável (\(X\)) pela média ponderada dos vizinhos (Defasagem Espacial ou Spatial Lag).
\[ \text{Pearson: } \sum (x_i - \bar{x})(y_i - \bar{y}) \quad \xrightarrow{\text{Espacial}} \quad \text{Moran: } \sum_{i} \sum_{j} w_{ij} (y_i - \bar{y})(y_j - \bar{y}) \]
Significa “si mesmo”.
É a correlação da variável \(Y_i\) com a variável \(Y_j\) (onde \(j\) são os vizinhos de \(i\) definidos pela matriz \(\mathbf{W}\)).
Se o valor em \(i\) é alto e a média dos vizinhos \(j\) também é alta, temos autocorrelação positiva.
Mensuração da dependência espacial
\[ I = \frac{n}{\sum_{i=1}^n \sum_{j=1}^n w_{ij}} \cdot \frac{\sum_{i=1}^n \sum_{j=1}^n w_{ij} (y_i - \bar{y})(y_j - \bar{y})}{\sum_{i=1}^n (y_i - \bar{y})^2}, \: \: \mathbf{W} = [w_{ij}]_{n\times n} \]
Interpretação
\(I > E[I], E[I]= -1/(n-1)\): Autocorrelação Positiva (agrupamento).
\(I < E[I]\): Autocorrelação Negativa (dispersão/xadrez).
\(I \approx E[I]\): Aleatoriedade.
Moran I test under randomisation
data: mg_sf$indicador
weights: lw
Moran I statistic standard deviate = 29.13, p-value < 2.2e-16
alternative hypothesis: greater
sample estimates:
Moran I statistic Expectation Variance
0.6193722870 -0.0011737089 0.0004537973
Monte-Carlo simulation of Moran I
data: mg_sf$indicador
weights: lw
number of simulations + 1: 1000
statistic = 0.61937, observed rank = 1000, p-value = 0.001
alternative hypothesis: greaterFoca na dissimilaridade quadrática entre vizinhos (similar ao variograma).
\[ c = \frac{(n-1)}{2 \sum_{i=1}^n \sum_{j=1}^n w_{ij}} \cdot \frac{\sum_{i=1}^n \sum_{j=1}^n w_{ij} (y_i - y_j)^2}{\sum_{i=1}^n (y_i - \bar{y})^2} \]
Interpretação
\(0 < c < 1\): Autocorrelação Positiva (vizinhos similares).
\(c > 1\): Autocorrelação Negativa (vizinhos dissimilares).
\(c = 1\): Aleatoriedade.
Geary C test under randomisation
data: mg_sf$indicador
weights: lw
Geary C statistic standard deviate = 26.149, p-value < 2.2e-16
alternative hypothesis: Expectation greater than statistic
sample estimates:
Geary C statistic Expectation Variance
0.377124962 1.000000000 0.000567393
Monte-Carlo simulation of Geary C
data: mg_sf$indicador
weights: lw
number of simulations + 1: 1000
statistic = 0.37712, observed rank = 1, p-value = 0.001
alternative hypothesis: greater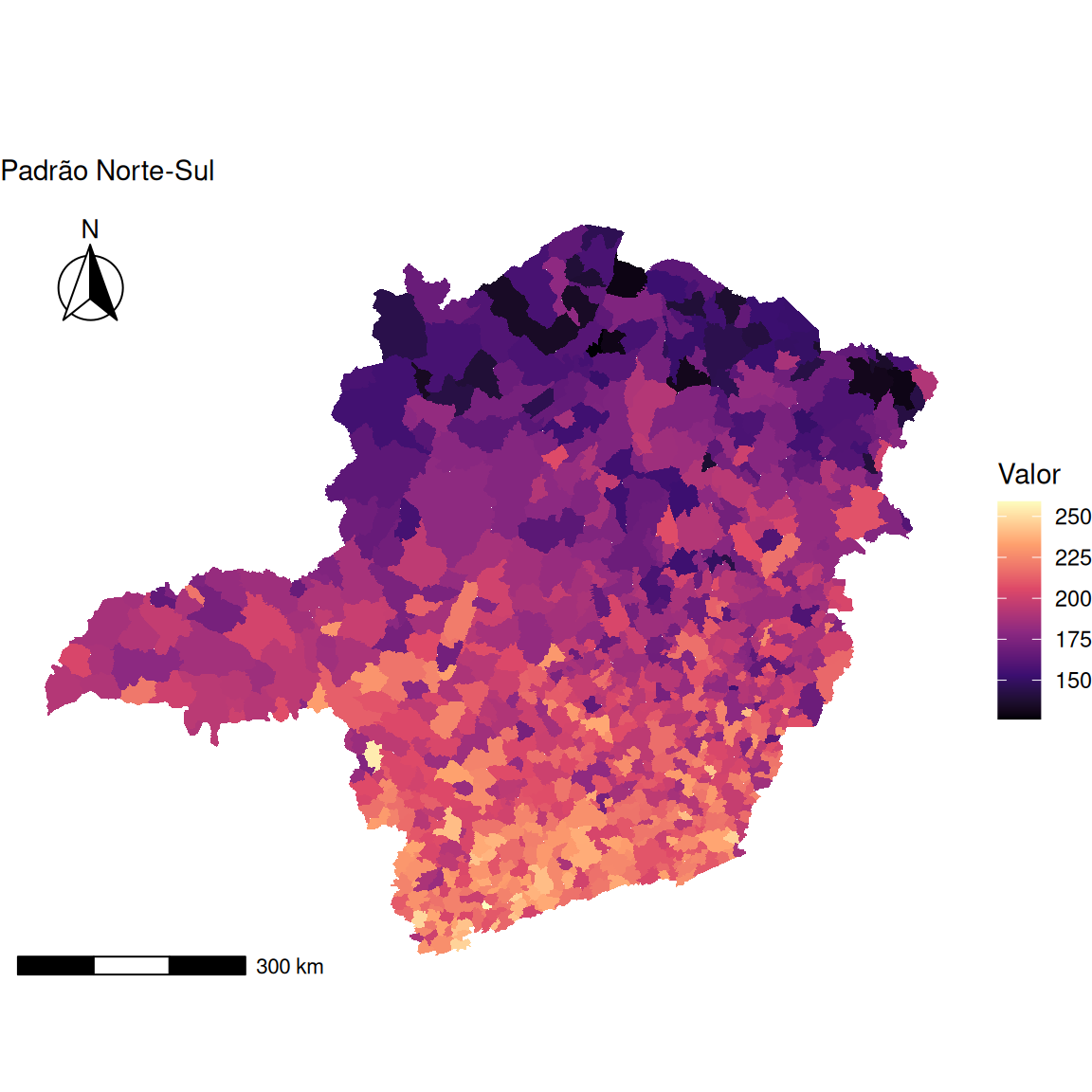
Estatísticas Locais
Decomposição da Dependência
\(\Longrightarrow\) Local Indicators of Spatial Association (LISA)
A dependência espacial raramente é estacionária (igual em todo o mapa). Segundo Anselin (1995), os indicadores locais (\(I_i\)) devem satisfazer duas propriedades:
Avaliar se o padrão em torno da unidade \(i\) é aleatório ou estruturado.
A soma dos indicadores locais é proporcional à estatística global (\(\sum_i I_i \propto I\)).
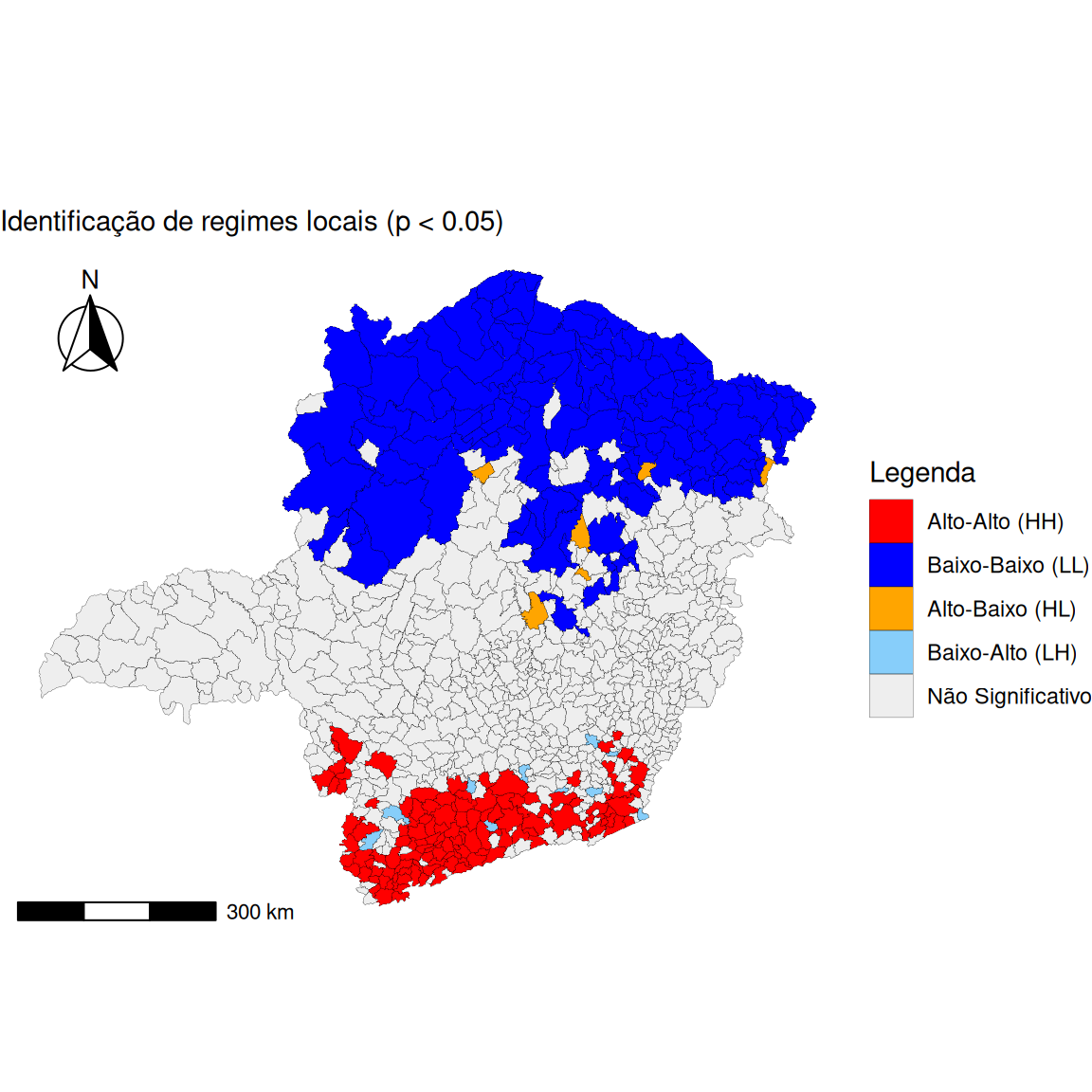
Índice de Moran Local (\(I_i\))
Avalia a correlação entre o valor local (\(s_i\)) e a média dos vizinhos (\(Ws_i\)).
\[ I_i = \frac{(y_i - \bar{y})}{S^2} \cdot \sum_{j=1}^n w_{ij} (y_j - \bar{y}) \]
Onde \(S^2\) é a variância amostral.
\(\Longrightarrow\) O que o \(I_i\) de Moran pode mostrar ?
Alto-Alto (High-High | HH):
- Valor alto cercado por vizinhos altos.
- Hot spot (contágio/transbordamento).
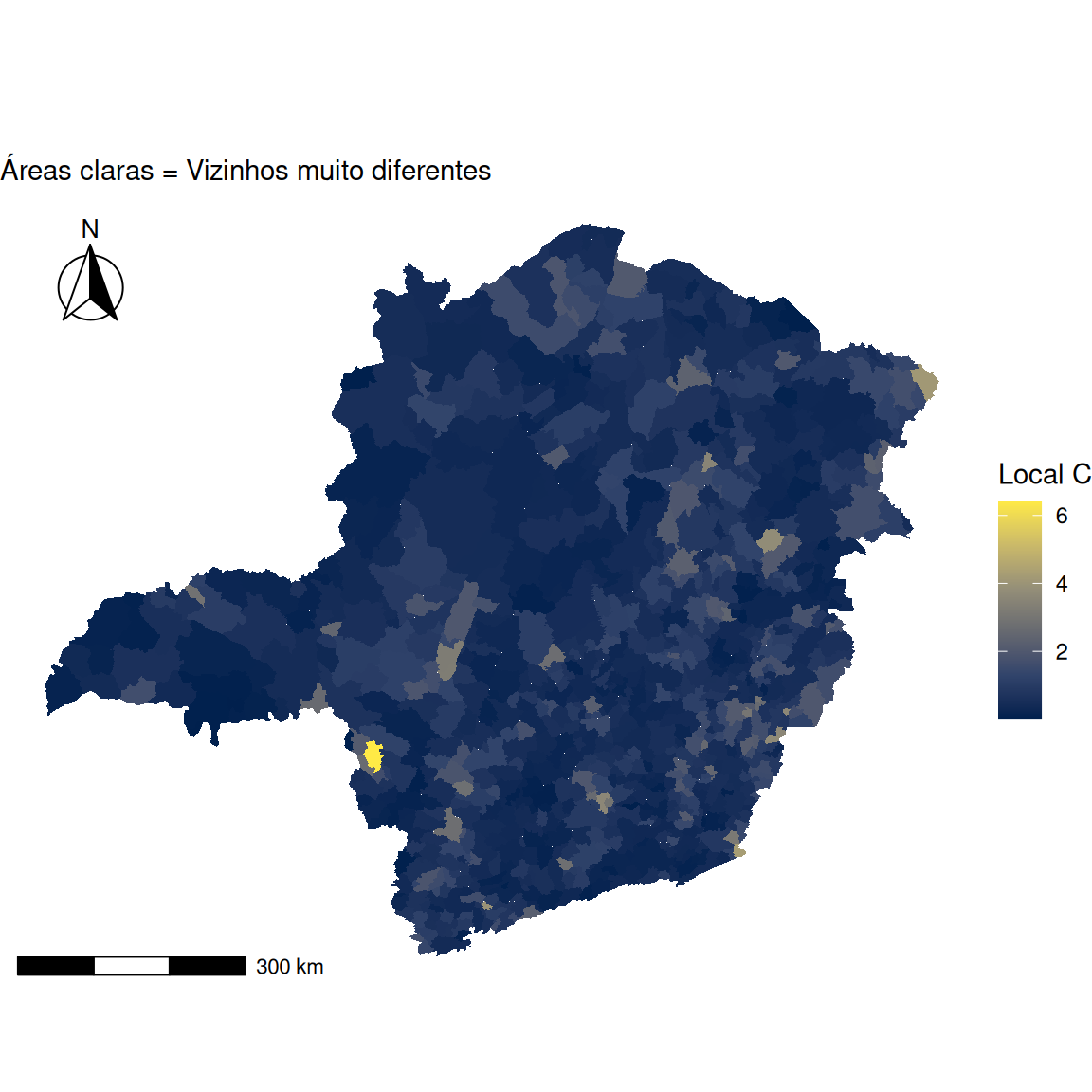
Baixo-Baixo (Low-Low | LL)
- Valor baixo cercado por vizinhos baixos.
- Cold spot (depressão ou barreira geográfica).
Alto-Baixo (High-Low | HL):
- “Ilha de riqueza”. Valor alto cercado por vizinhos baixos.
- Indica processos locais distintos do entorno.
Baixo-Alto (Low-High | LH):
- “Buraco”. Valor baixo cercado por vizinhos altos.
- Pode indicar falha de medição ou resiliência local.
Estatísticas Getis-Ord (\(G_i^*\))
- Foca na detecção de intensidade (valores altos ou baixos), sem a componente de covariância negativa do Moran.
\[G_i^* = \frac{\sum_{j=1}^n w_{ij} y_j}{\sum_{j=1}^n y_j}\]
\(G_i\): Exclui a unidade \(i\).
\(G_i^*\): Inclui a unidade \(i\) (mais comum).
Diferença: Moran local distingue clusters de outliers. Getis-Ord identifica apenas Hot Spots e Cold Spots.
A estatística retorna um valor Z padronizado:
\(Z(G_i^*) > 1.96\): Hot Spot (Agrupamento significativo de valores altos).
\(Z(G_i^*) < -1.96\): Cold Spot (Agrupamento significativo de valores baixos).
Entre: Aleatoriedade espacial.
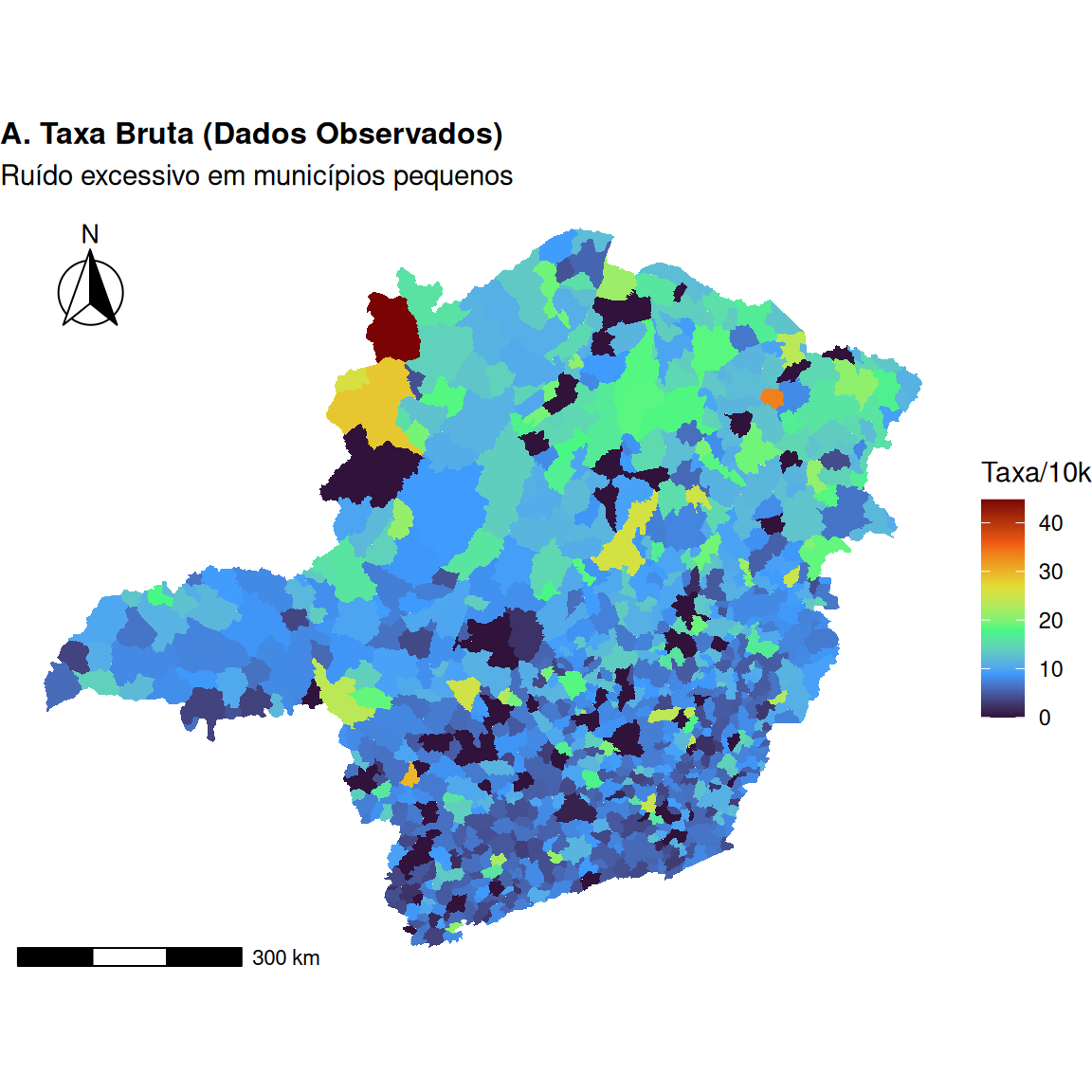
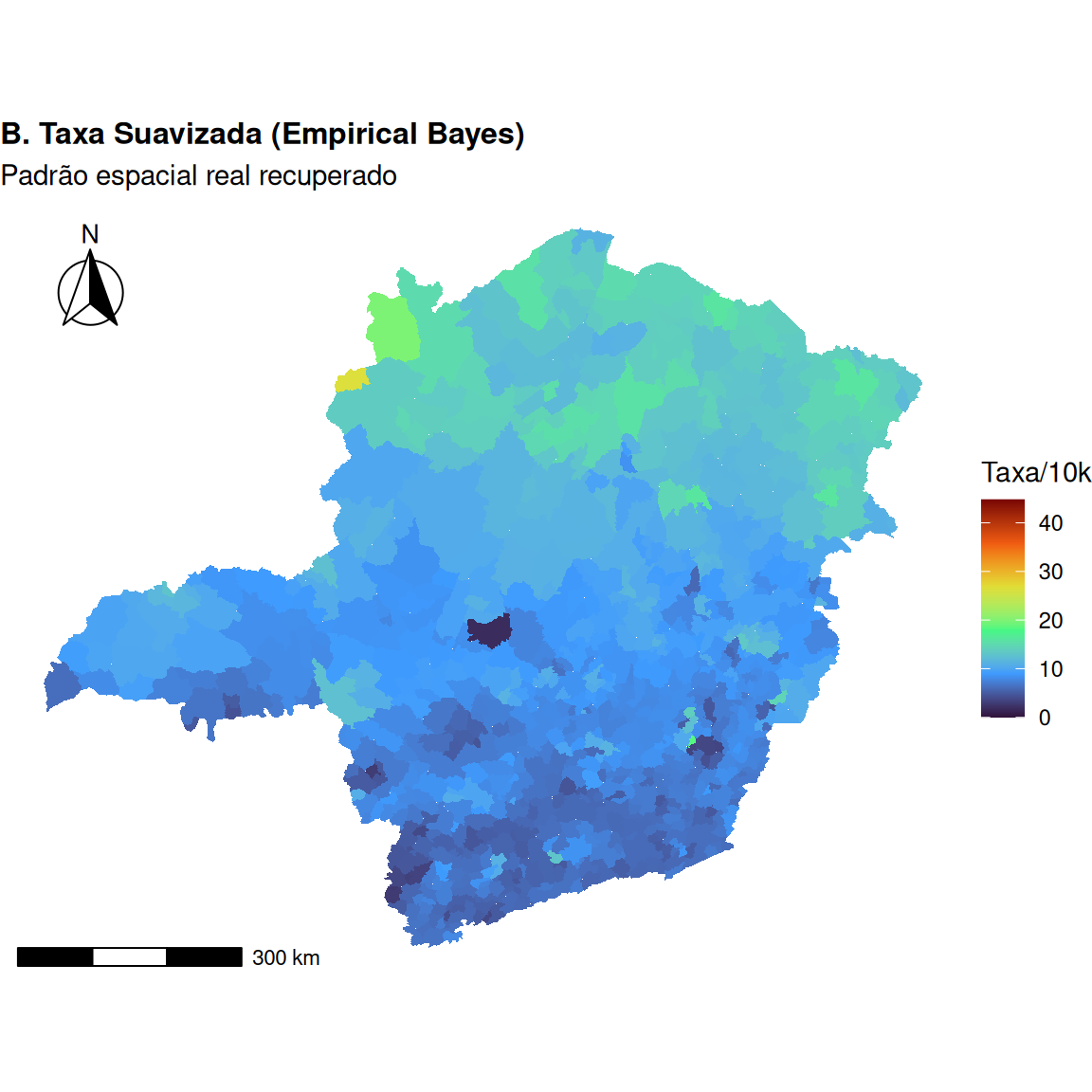
Riscos e suavização de taxas
O Problema das Áreas Pequenas
\(\Longrightarrow\) O desafio dos dados brutos
Para dados de contagem \(O_i\) com população em risco \(P_i\), a taxa bruta é \(r_i = O_i / P_i\).
Em epidemiologia, usa-se a Razão de Mortalidade Padronizada (SMR):
\[ \text{SMR}_i = \frac{O_i}{E_i} \quad \text{onde} \quad E_i = P_i \cdot \bar{r} \]
Em áreas com \(P_i\) pequena, a variância é altíssima (Cressie; Chan, 1989).
Um único caso adicional em uma cidade pequena pode duplicar a taxa, criando outliers espúrios.
O mapa é dominado por áreas despovoadas com taxas extremas (mas pouco confiáveis).
Diagnóstico de Dependência Espacial
ESDA em Resíduos de Regressão
\(\Longrightarrow\) Por que analisar os resíduos?
- Detectar autocorrelação em \(\mathbf{y}\) (dados brutos) não prova um processo espacial intrínseco (contágio). Pode ser apenas heterogeneidade não observada ou variáveis omitidas espacialmente estruturadas (Cressie; Chan, 1989).
Roteiro de Diagnóstico (Anselin (2001))
- Estimar o modelo clássico (Mínimos Quadrados Ordinários).
\[\mathbf{y} = \mathbf{X}\boldsymbol{\beta} + \boldsymbol{\varepsilon}, \quad \boldsymbol{\varepsilon} \sim N(\mathbf{0}, \sigma^2 \mathbf{I})\] 2. Calcular os resíduos \(\hat{\boldsymbol{\varepsilon}} = \mathbf{y} - \mathbf{X}\hat{\boldsymbol{\beta}}\).
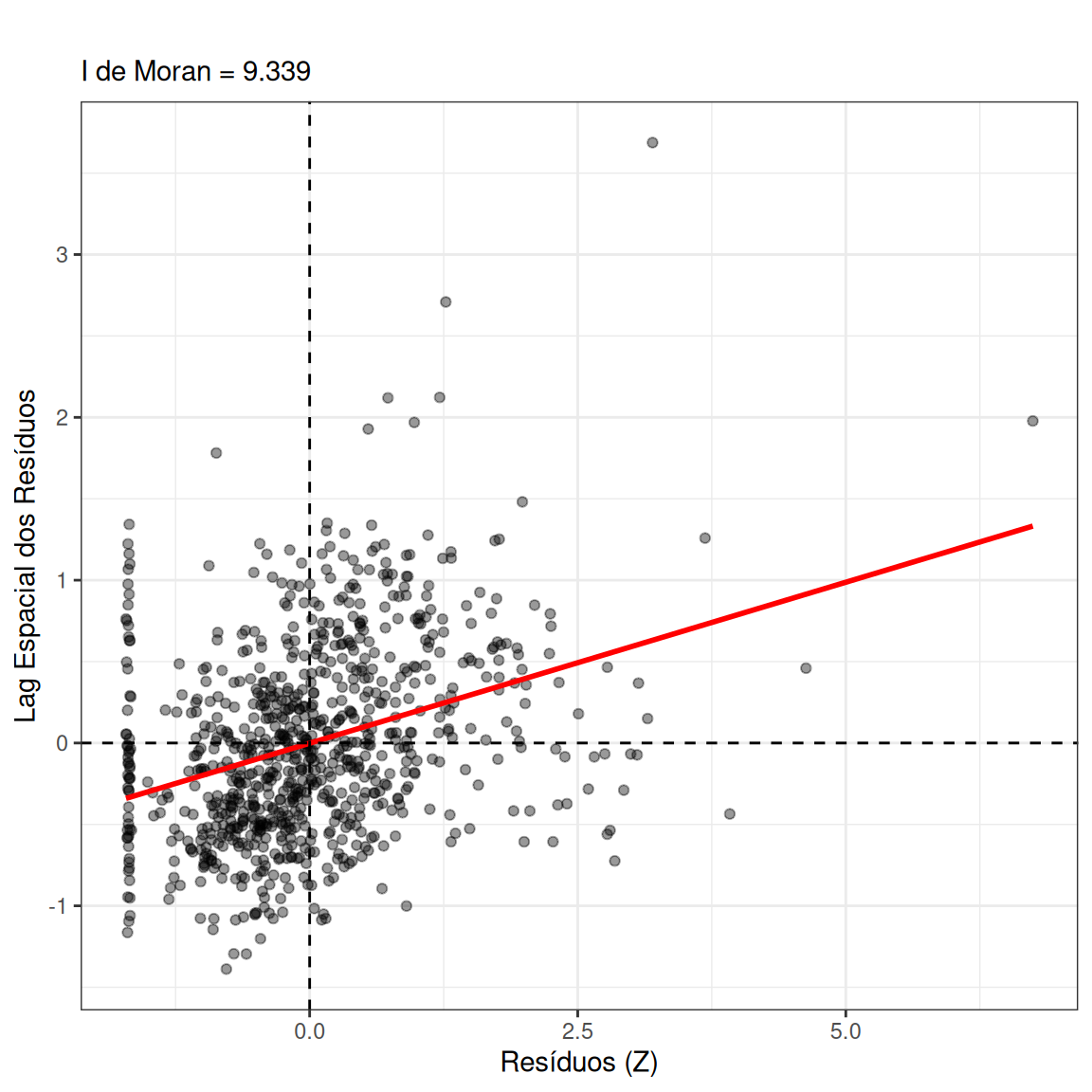
- Aplicar o \(I\) de Moran sobre \(\hat{\boldsymbol{\varepsilon}}\) usando a matriz \(\mathbf{W}\).
Nota: Se \(I(\hat{\boldsymbol{\varepsilon}})\) for significativo, o pressuposto de independência é violado. Porém, a escolha incorreta de \(\mathbf{W}\) pode levar a diagnósticos falsos (Zhang; Yu, 2018).
Global Moran I for regression residuals
data:
model: lm(formula = taxa_bruta ~ variavel_x, data = mg_dados)
weights: lw
Moran I statistic standard deviate = 9.3389, p-value < 2.2e-16
alternative hypothesis: two.sided
sample estimates:
Observed Moran I Expectation Variance
0.1977385849 -0.0011812437 0.0004536919 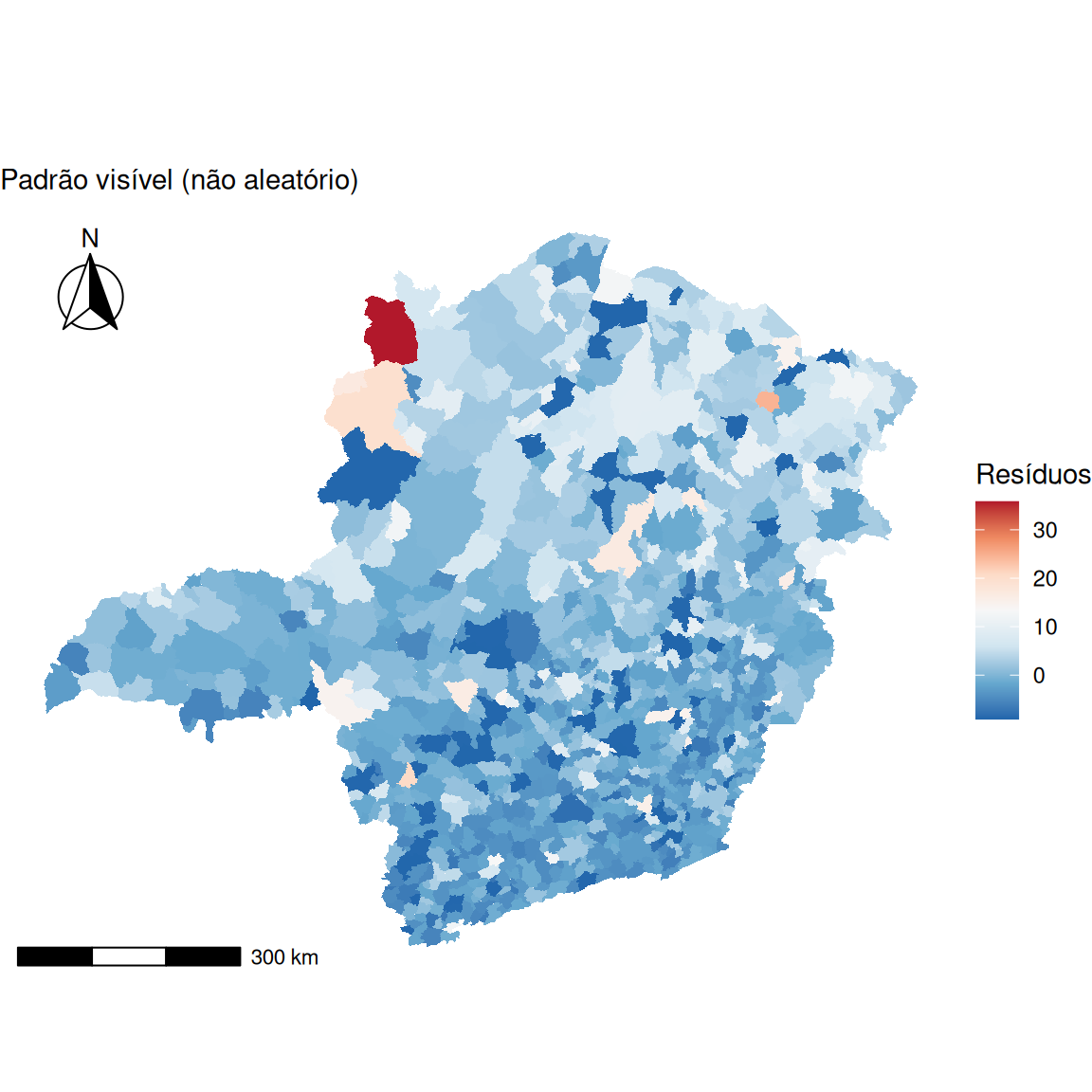
Modelos mais comuns em dados de área: CAR, ICAR, e BYM
Modelagem de dependência em área
Segundo Cressie (1993), existem duas formas canônicas de especificar a dependência espacial em reticulados (lattice data):
Especificação Condicional (CAR):
- Modela a distribuição de uma área dado os seus vizinhos.
Especificação Simultânea (SAR)
- Modela o sistema de equações de feedback simultâneo entre todas as áreas.
Modelo Condicional Autorregressivo (CAR)
\(\Longrightarrow\) “Diga-me quem são teus vizinhos, e eu te direi quem és.”
- Introduzido por Besag (1974), o CAR define o valor de uma unidade \(Y_i\) não isoladamente, mas condicionado aos valores de todos os outros locais (\(\mathbf{Y}_{-i} = \{Y_j : j \neq i\}\)).
\(Y_i = \mu_i + \sum_{j \neq i} w_{ij}(Y_j - \mu_j) + \epsilon_i,\)
\(\mathbb{E} [Y_i \mid \mathbf{Y}_{-i}] = \mu_i + \sum_{j \neq i} w_{ij}(Y_j - \mu_j)\)
- Se meus vizinhos estão acima da média, eu provavelmente também estarei.
Seja \(\mathbf{Y}_{-i} = \{Y_j : j \neq i\}\). O modelo é definido por uma família de distribuições condicionais Gaussianas:
\[ Y_i \mid \mathbf{Y}_{-i} \sim \mathcal{N}\left( \mu_i + \sum_{j \neq i} w_{ij}(Y_j - \mu_j),\, \sigma_i^2 \right) \]
\(\mu_i = \mathbf{x}_i^\top \boldsymbol{\beta}\).
\(w_{ij} \in W\): Pesos espaciais (interação vizinha).
\(\sigma_i^2\): Variância condicional (incerteza local).
\(\Longrightarrow\) Teorema de Hammersley-Clifford
Para que as condicionais locais formem uma distribuição conjunta válida \(\mathbf{Y} \sim \mathcal{N}_n(\boldsymbol{\mu}, \mathbf{\Sigma})\), a matriz de precisão \(\mathbf{Q} = \mathbf{\Sigma}^{-1}\) deve ser simétrica e positiva definida.
\(\mathbf{Y} \sim \mathcal{N}_n(\boldsymbol{\mu}, \mathbf{Q}_{CAR}^{-1}), \: \: \mathbf{Q}_{CAR} = \mathbf{M}^{-1} (\mathbf{I} - \rho \mathbf{W}), \: \: \mathbf{M} = \text{diag}(\sigma_1^2, \dots, \sigma_n^2)\)
- \(\rho\): Parâmetro de dependência espacial.
- \(\mathbf{I}\): Matriz identidade.
Para que a matriz \(\mathbf{Q}\) seja simétrica, os pesos e as variâncias devem satisfazer:
\(\frac{w_{ij}}{\sigma_i^2} = \frac{w_{ji}}{\sigma_j^2}\)
Lembrando
Se \(w_{ij} \neq 0\), então \(i \sim j\) (são vizinhos). Os elementos da diagonal da precisão são \(Q_{ii} = 1/\sigma_i^2\). Os elementos fora da diagonal são \(Q_{ij} = -\rho w_{ij}/\sigma_i^2\).
Modelo CAR Intrínseco (ICAR)
O ICAR é um caso particular do modelo CAR onde a dependência espacial é máxima.
Ocorre quando \(\rho \to 1\).
Matriz de Precisão (\(\mathbf{Q}\)): Torna-se singular (não invertível) e semidefinida positiva com posto \(n-1\).
Atua como uma prior espacial que penaliza diferenças locais, suavizando o mapa sem definir um nível médio absoluto (o intercepto flutua livremente).
Amplamente utilizado em estatística Bayesiana (INLA, WinBUGS) como efeito aleatório estruturado (Besag; York; Mollié, 1991).
Como \(\rho \approx 1\), a média condicional depende apenas da média simples dos vizinhos.
\(Y_i \mid \mathbf{Y}_{-i} \sim \mathcal{N}\left( \bar{Y}_{\partial i},\, \frac{\sigma^2}{m_i} \right)\)
\(\mathbb{E}[Y_i \mid \mathbf{Y}_{-i}] = \frac{1}{m_i}\sum_{j \in \partial i} Y_j\)
- A melhor estimativa para \(Y_i\) é a média aritmética dos seus vizinhos.
\(\text{Var}[Y_i \mid \mathbf{Y}_{-i}] = \frac{\sigma^2}{m_i}\)
- A incerteza é inversamente proporcional ao número de vizinhos (\(m_i\)). Áreas com poucos vizinhos têm maior variância.
- A matriz de precisão é
\(\mathbf{Q} = \sigma^{-2}(\mathbf{D} - \mathbf{W})\).
Como \(\mathbf{Q}\mathbf{1} = \mathbf{0}\), a distribuição é imprópria (não integra a 1).
A densidade depende apenas das diferenças entre pares (pairwise difference prior):
\(p(\mathbf{Y}) \propto \exp\left( -\frac{1}{2\sigma^2} \sum_{i \sim j} (Y_i - Y_j)^2 \right)\)
Para tornar o modelo identificável (obter uma distribuição própria), impõe-se uma restrição matemática:
\(\sum_{i=1}^n Y_i = 0 \quad (\text{Restrição de soma-zero})\)
Isso projeta os efeitos espaciais no subespaço ortogonal ao vetor constante \(\mathbf{1}\).
Garante unicidade e propriedades matemáticas bem definidas (Keefe; Ferreira; Franck, 2018).
O ICAR é frequentemente combinado com um efeito aleatório independente (ruído) para formar o modelo Besag-York-Mollié, separando o que é estrutura espacial do que é ruído puro.
Modelo SAR
Embore comum na estatística, vamos falar dele na seção de modelos econometricos.
Modelos BYM e BYM2
\(\Longrightarrow\) Por que não usar (I)CAR/SAR direto em \(Y\)?
- Em epidemiologia e demografia, \(Y_i\) são contagens.
\(y_i \mid \theta_i \sim \text{Poisson}(E_i \theta_i)\)
- O risco \(\theta_i\) deve ser \(>0\). Modelos lineares clássicos podem prever valores negativos.
2.GLM: Modelamos o logaritmo do risco (função de ligação canônica).
\(\eta_i = \log(\theta_i) = \mu + \mathbf{x}_i^\top \boldsymbol{\beta} + \varepsilon_i\)
- O termo \(\varepsilon_i\) captura a variabilidade residual latente, que pode ter estrutura espacial.
Diferente da modelagem direta da resposta, aqui modelamos o preditor linear.
\[ \begin{align} \text{Observado:} & \quad y_i \sim \text{Poisson}(E_i e^{\eta_i}) \\ \text{Latente:} & \quad \eta_i = \underbrace{\mu + \mathbf{x}_i^\top \boldsymbol{\beta}}_{\text{Fixo}} + \underbrace{\varepsilon_i}_{\text{Aleatório}} \end{align} \]
A grande questão é: como estruturar \(\varepsilon_i\)?
Proposto por Besag; York; Mollié (1991), decompõe o erro em dois componentes aditivos:
\(\varepsilon_i = u_i + v_i\)
- Estrutural (\(u_i\)) - Espacial
Prior: ICAR.
Captura dependência local (suavização).
Distribuição condicional aos vizinhos.
- Não estrutural (\(v_i\)) - iid
Prior: \(N(0, \tau_v^{-1})\).
Captura heterogeneidade pura (ruído)
Independente entre áreas.
Apesar de clássico, o BYM tem falhas graves apontadas por Riebler et al. (2016):
Identificabilidade: Apenas a soma \(\varepsilon = u+v\) é vista pelos dados. \(u\) e \(v\) competem pela explicação da variância.
A variância do componente espacial depende da geometria do grafo.
Consequência: A mesma prior \(\tau_u\) tem significados diferentes em mapas diferentes (ex: SP vs. Amazonas).
Riebler et al. (2016) resolvem o problema do modelo BYM escalonando a matriz (\(\mathbf{Q}_*\)) para que a variância geométrica média seja 1 e reparametrizando: \(\boldsymbol{\varepsilon} = \frac{1}{\sqrt{\tau}} \left( \sqrt{1 - \phi}\,\mathbf{v} + \sqrt{\phi}\,\mathbf{u}_* \right)\)
\(\tau\) (Precisão Marginal): Controla a variância total do efeito latente.
\(\phi \in [0, 1]\) (Peso Espacial): Proporção da variância explicada pela estrutura espacial.
A grande vantagem do BYM2 é a interpretação direta de \(\phi\): \(\text{Var}(\boldsymbol{\varepsilon}) = \underbrace{(1 - \phi)\sigma^2}_{\text{Ruído IID}} + \underbrace{\phi \sigma^2}_{\text{Espacial}}\)
\(\phi \to 1\): O fenômeno é puramente espacial (ICAR). O mapa é suave.
\(\phi \to 0\): O fenômeno é puramente ruído aleatório. O mapa é irregular.
\(\phi \approx 0.5\): Metade da variação vem dos vizinhos, metade é idiossincrasia local.
Modelos Econométricos Espaciais
Diferenças fundamentais
\(\Longrightarrow\) Qual o foco da análise?
Estatística Espacial (CAR/ICAR)
Suavização, predição e ajuste.
Condicional (\(Y_i \mid Y_{-i}\)).
Econometria Espacial
Foco: Causalidade, teste de hipóteses e impacto de políticas.
Mecanismo: Simultâneo (\(\mathbf{y} = (\mathbf{I} - \rho\mathbf{W})^{-1}\mathbf{X}\boldsymbol{\beta}\)).
Base Teórica: Interação estratégica, contágio, externalidades (Anselin, 1988).
Elhorst et al. (2014) define três canais de dependência:
Defasagem em Y (\(\mathbf{W}\mathbf{y}\)):
Endógena. O meu resultado depende do resultado do vizinho.
Ex: Competição fiscal, efeitos de pares, contágio de preços.
Defasagem em X (\(\mathbf{W}\mathbf{X}\))
Exógena. O meu resultado depende das características do vizinho.
Ex: Criminalidade local afetada pelo policiamento vizinho (deslocamento).
Defasagem no erro (\(\mathbf{W}\mathbf{u}\))
Residual. Choques não observados correlacionados.
Ex: Variáveis ambientais omitidas (poluição, clima) que afetam regiões vizinhas igualmente.
O Modelo Geral de Aninhamento Espacial (GNS - General Nesting Spatial Model) engloba todas as interações (Elhorst, 2022): \(\mathbf{y} = \rho \mathbf{W}\mathbf{y} + \mathbf{X}\boldsymbol{\beta} +\mathbf{W}\mathbf{X}\boldsymbol{\theta} + \mathbf{u}, \: \:\mathbf{u} = \lambda \mathbf{W}\mathbf{u} + \boldsymbol{\epsilon}\)
Componentes Principais
\(\rho \mathbf{W}\mathbf{y}\): Efeito de feedback simultâneo.
\(\mathbf{W}\mathbf{X}\boldsymbol{\theta}\): Efeito de transbordamento local (spillover).
\(\lambda \mathbf{W}\mathbf{u}\): Correlação nos erros não observados.
Parâmetros
\(\rho\): Intensidade do contágio endógeno.
\(\boldsymbol{\beta}\): Efeito direto das covariáveis.
\(\boldsymbol{\theta}\): Efeito indireto (vizinhos).
\(\lambda\): Intensidade da correlação residual.
Nota: A escolha do modelo é teórica. Você acredita em contágio real (\(\rho\)) ou apenas em variáveis omitidas (\(\lambda\))?
A família de modelos GNS
\(\Longrightarrow\) Modelo de Defasagem Espacial (Spatial Autoregressive Model: \(\rho \neq 0, \lambda = 0, \theta = 0\)
\[ Y_i = \rho \sum_{j=1}^n w_{ij} Y_j + \mathbf{x}_i^\top \boldsymbol{\beta} + \epsilon_i, \quad \epsilon_i \sim \mathcal{N}(0, \sigma^2) \]
Interpretação dos coeficientes
Efeito direto: Impacto da mudança em \(x_{ik}\) sobre \(y_i\).
Efeito indireto (Spillover): Impacto da mudança em \(x_{ik}\) sobre todos os outros \(y_j\).
Estimação
- Máxima Verossimilhança (ML) ou Variáveis Instrumentais (GMM/IV) usando defasagens de X (\(\mathbf{WX}\)) como instrumentos.
\(\Longrightarrow\) Modelo de erro espacial (Spatial Error Model: \(\lambda \neq 0, \rho = 0, \theta = 0\))
\[ y_i = \sum_{k=1}^K x_{ik}\beta_k + u_i, \qquad u_i = \lambda \sum_{j=1}^N w_{ij} u_j + \epsilon_i, \qquad \epsilon_i \sim \mathcal{N}(0, \sigma^2). \]
Interpretação dos coeficientes
\(\beta_k\) são os efeitos marginais diretos (Derivadas Parciais).
Uma variação em \(x_{ik}\) afeta apenas \(y_i\) (sem feedback ou spillovers na média).
Estimação
- Máxima Verossimilhança (ML) ou GMM para incorporar a estrutura não esférica da covariância (\(\boldsymbol{\Omega}\)).
\(\Longrightarrow\) Modelo de defasagem espacial de X (Spatial Lag of X: \(\rho = 0, \lambda = 0, \boldsymbol{\theta} \neq \mathbf{0}\))
\[ y_i = \alpha + \sum_{k=1}^K x_{ik}\beta_k + \sum_{k=1}^K \theta_k \left( \sum_{j=1}^n w_{ij} x_{jk} \right) + \epsilon_i \]
Interpretação dos coeficientes
Efeito direto (\(\beta_k\)): Mudança em \(x_{ik}\) afeta \(y_i\).
Efeito indireto (\(\theta_k\)): Spillover local. Mudança em \(x_{jk}\) afeta \(y_i\).
Estimação e Vantagens
- Mínimos quadrados (OLS): Como \(\mathbf{W}\mathbf{X}\) é exógena, estimadores OLS são não viesados, consistentes e eficientes (Halleck Vega; Elhorst, 2015).
\(\Longrightarrow\) Modelo Espacial de Durbin (Spatial Durbin Model: \(\lambda = 0, \rho \neq 0, \boldsymbol{\theta} \neq \mathbf{0}\))
\[ y_i = \rho \sum_{j=1}^n w_{ij} y_j + \sum_{k=1}^K x_{ik}\beta_k + \sum_{k=1}^K \theta_k \left( \sum_{j=1}^n w_{ij} x_{jk} \right) + \epsilon_i \]
Decomposição de impactos
Efeito direto: Impacto de \(x_{ik}\) em \(y_i\) (com feedback).
Efeito indireto: Impacto de \(x_{ik}\) em todos os outros \(y_j\).
Estimação
- Requer Máxima Verossimilhança (ML) ou MCMC (Bayesiano) devido ao termo endógeno \(\mathbf{W}\mathbf{y}\).
\(\Longrightarrow\) Modelo Espacial de Durbin com Erro (Spatial Durbin Error Model: \(\rho = 0, \lambda \neq 0, \boldsymbol{\theta} \neq \mathbf{0}\))
\[ y_i = \sum_{k=1}^K x_{ik}\beta_k + \sum_{k=1}^K \theta_k \left( \sum_{j=1}^n w_{ij} x_{jk} \right) + u_i, \quad u_i = \lambda \sum_{j=1}^n w_{ij} u_j + \epsilon_i. \]
Interpretação dos coeficientes
Efeito direto (\(\beta_k\)): Impacto de \(x_{ik}\) em \(y_i\). Idêntico à regressão clássica.
Efeito indireto (\(\theta_k\)): Impacto de \(x_{jk}\) em \(y_i\). Se \(w_{ij}=0\), o efeito é nulo.
Estimação
- Requer Máxima Verossimilhança (ML) ou GMM para tratar a estrutura de covariância não esférica dos erros.
\(\Longrightarrow\) Modelo Autorregressivo Espacial com Erros Autorregressivos (Spatial Combined: \(\rho \neq 0, \lambda \neq 0, \boldsymbol{\theta} = \mathbf{0}\))
\[ y_i = \rho \sum_{j=1}^n w_{1,ij} y_j + \sum_{k=1}^K x_{ik}\beta_k + u_i, \quad u_i = \lambda \sum_{j=1}^n w_{2,ij} u_j + \epsilon_i. \]
Interpretação dos coeficientes
Segue a lógica do SAR: \(\mathbb{E}[\mathbf{y}] = (\mathbf{I}_n - \rho \mathbf{W}_1)^{-1}\mathbf{X}\boldsymbol{\beta}\).
Requer decomposição em efeitos diretos, indiretos e totais.
Estimação
- GMM (GS2SLS) ver aula
\(\Longrightarrow\) Modelo de Média Móvel Espacial (Spatial Moving Average)
\[ y_i = \sum_{k=1}^K x_{ik}\beta_k + \epsilon_i + \lambda \sum_{j=1}^n w_{ij} \epsilon_j, \quad \epsilon_i \sim \mathcal{N}(0, \sigma^2) \]
Interpretação da Covariância
A estrutura de covariância é finita: \(\boldsymbol{\Omega} = \sigma^2 (\mathbf{I}_n + \lambda \mathbf{W})(\mathbf{I}_n + \lambda \mathbf{W})^{\top}\).
A correlação é nula para unidades que não sejam vizinhas diretas nem compartilhem um vizinho comum.
Decaimento abrupto da correlação espacial (ao contrário do SEM).
Estimação
- Máxima Verossimilhança.
Modelos para respostas limitadas e discretas
\(\Longrightarrow\) Variável dependente binária (\(y_i \in \{0, 1\}\)) com dependência espacial.
- O modelo assume uma variável latente contínua \(y_i^*\) que segue um processo espacial autoregressivo:
\[ y_i^* = \rho \sum_{j=1}^n w_{ij} y_j^* + \mathbf{x}_i^{\top}\boldsymbol{\beta} + \epsilon_i, \: \epsilon_i \sim \mathcal{N}(0, 1) \Rightarrow y_i = \begin{cases} 1, & \text{se } y_i^* > 0 \\ 0, & \text{se } y_i^* \le 0 \end{cases} \]
Bayesiana (MCMC): Trata \(y^*\) como parâmetro latente e amostra sequencialmente de uma normal truncada (LeSage, 2000).
GMM
Interpretação
- Uma mudança em \(x_{ik}\) altera a probabilidade \(P(y_i=1)\). Essa alteração afeta os vizinhos via \(\rho\). O efeito retorna a \(i\) (feedback).
Use os efeitos médios diretos, indiretos e totais calculados via simulação ou MCMC (LeSage; Pace, 2009).
\(\Longrightarrow\) Variável dependente categórica ordenada (ex: Nível de satisfação: Baixo < Médio < Alto).
\[ y_i = j \quad \iff \quad \gamma_j < y_i^* \le \gamma_{j+1}, \: y_i \in \{0, \dots, J\}\\ \Downarrow\\ \mathbf{y}^* = \rho \mathbf{W}\mathbf{y}^* + \mathbf{X}\boldsymbol{\beta} + \boldsymbol{\epsilon}, \quad \boldsymbol{\epsilon} \sim \mathcal{N}(\mathbf{0}, \mathbf{I}_n) \]
- Estimação Bayesiana (MCMC)
Deve-se reportar para CADA categoria \(j\):
Efeito direto: Impacto médio na própria unidade.
Efeito indireto: Impacto médio nos vizinhos.
Efeito total: Soma dos dois.
\(\Longrightarrow\) Variável contínua censurada (ex: muitos zeros e cauda contínua).
- O modelo assume uma variável latente contínua \(y_i^*\) que segue um processo espacial autoregressivo (SAR Tobit):
\[ y_i^* = \rho \sum_{j=1}^n w_{ij} y_j^* + \mathbf{x}_i^{\top}\boldsymbol{\beta} + \epsilon_i, \quad \epsilon_i \sim \mathcal{N}(0, \sigma^2)\\ \Downarrow\\ y_i = \max(0, y_i^*) \]
Bayesiana (MCMC)
EM (Expectation-Maximization): Imputa valores esperados para os dados censurados e maximiza a verossimilhança (McMillen, 1992).
Interpretação
Efeito direto: Impacto de \(x_{ik}\) em \(y_i\) (considerando a probabilidade de \(y_i > 0\)).
Efeito indireto: Spillover espacial.
Interpreto os coeficientes ou os impactos?
\(\Longrightarrow\) A chave é o parâmetro de defasagem espacial em \(Y\) (\(\rho\)).
- A interpretação depende se existe um multiplicador espacial que gera ciclos de feedback (\(i \to j \to i\)).
Sem feedback global (\(\rho = 0\)):
\(\frac{\partial y_i}{\partial x_{ik}} = \beta_k\). O que acontece no vizinho fica no vizinho.
Ação: Interprete os \(\beta\) e \(\theta\) diretamente da tabela (
summary()).
Com Feedback Global (\(\rho \neq 0\)):
\(\frac{\partial \mathbf{y}}{\partial \mathbf{x}_k} = (\mathbf{I} - \rho \mathbf{W})^{-1} \beta_k\). O \(\beta\) estimado é apenas o impulso inicial, não o resultado final.
Ação: Ignore o
summary(). Calcule os Efeitos diretos, indiretos e totais (funçãoimpacts()).
| Critério | Modelos Locais (OLS, SEM, SLX, SDEM) |
Modelos Globais (SAR, SDM, SAC) |
|---|---|---|
| Parâmetro \(\rho\) | \(\rho = 0\) (Ausente) | \(\rho \neq 0\) (Presente) |
| Mecanismo | Transmissão direta | Multiplicador \((\mathbf{I} - \rho \mathbf{W})^{-1}\) |
| Feedback | Finito (\(i \to j\)) | Infinito (\(i \leftrightarrow j \leftrightarrow \dots\)) |
| Interpretação | Direto do summary() |
Obrigatório impacts() |
| Coeficiente \(\beta\) | É o Efeito Direto | Impulso inicial (Pré-feedback) |
| Coeficiente \(\theta\) | É o Spillover | Compõe o cálculo total |
| No R | coef(modelo) |
impacts(modelo) |
Modelos locais e não estacionários
\(\Longrightarrow\) A falácia da média espacial.
Modelos globais (OLS, SAR, SEM) assumem estacionariedade espacial: a relação entre \(Y\) e \(X\) é constante em todo o mapa (\(\boldsymbol{\beta}\) fixo).
Exemplo: Um modelo global assume que o preço por \(m^2\) da área construída é o mesmo na periferia e em bairros nobres.
Realidade: Existe um valor intrínseco de localização:
Bairros nobres: \(\beta_{area}\) alto.
Periferia: \(\beta_{area}\) baixo.
Modelos globais aplicados a processos heterogêneos produzem estimativas médias enganosas, mascarando variações locais. (Lu et al., 2014)
\(\Longrightarrow\) Decomposição de parâmetros.
Modelos locais (GWR, MGWR) permitem que os parâmetros flutuem no espaço \((u_i, v_i)\).
\[ y_i = \beta_0(u_i, v_i) + \sum_{k=1}^{p} \beta_k(u_i, v_i) x_{ik} + \epsilon_i \]
- O objetivo é estimar um vetor \(\boldsymbol{\beta}_i\) para cada localização \(i\), revelando a estrutura espacial oculta nas relações entre variáveis.
GWR
\(\Longrightarrow\) Regressão Geograficamente Ponderada
- Em vez de minimizar os quadrados globais, minimizamos os erros ponderados pela proximidade a \(i\):
\[ y_i = \beta_0(u_i, v_i) + \sum_{k=1}^{p} \beta_k(u_i, v_i) x_{ik} + \epsilon_i\: \Longrightarrow \hat{\boldsymbol{\beta}}(u_i, v_i) = \left( \mathbf{X}^\top \mathbf{W}(i) \mathbf{X} \right)^{-1} \mathbf{X}^\top \mathbf{W}(i) \mathbf{y} \]
\[ \mathbf{W}(i) = \text{diag}\left(w_{i1}, w_{i2}, \dots, w_{in}\right) = \begin{bmatrix} w_{i1} & 0 & \cdots & 0 \\ 0 & w_{i2} & \cdots & 0 \\ \vdots & \vdots & \ddots & \vdots \\ 0 & 0 & \cdots & w_{in} \end{bmatrix}_{n \times n}, \]
\(w_{ij}\): Peso da observação \(j\) na calibração do ponto \(i\). Decai com a distância \(d_{ij}\).
A forma como \(w_{ij}\) decai é crucial.
Fixo: \(b\) constante (raio fixo). Ruim para dados com densidade variável.
Adaptativo: \(b\) definido por \(N\) vizinhos mais próximos. Ajusta-se à densidade dos dados (Guo; Ma; Zhang, 2008).
Trade-off:
\(b\) pequeno \(\to\) Alta variância (overfitting).
\(b\) grande \(\to\) Alto viés (tende ao OLS global).
Seleção de \(b\) (AICc)
Busca-se o \(b\) que minimiza o AIC corrigido. O
MGWR
A Limitação da GWR: Assume um único \(b\) para todas as covariáveis. Força o modelo a assumir que o “Clima” (global) varia na mesma escala que a “Renda” (local).
A Solução MGWR: Permite uma largura de banda \(bw_j\) específica para cada covariável \(j\).
\[ y_i = \beta_0(u_i, v_i; bw_0) + \sum_{j=1}^{p} \beta_j(u_i, v_i; bw_j) \, x_{ij} + \epsilon_i \]
- O parâmetro \(bw_j\) deixa de ser apenas técnico e torna-se um indicador da escala do processo (Fotheringham; Yang; Kang, 2017).
Não existe solução analítica direta (como no WLS da GWR).
Usa-se um processo iterativo inspirado em GAMs (Modelos Aditivos Generalizados) (Yu et al., 2020).
Começa com estimativas OLS ou GWR padrão.
Para cada variável \(j\):
Calcula o resíduo parcial (\(\mathbf{r}_j\)): Remove o efeito estimado de todas as outras variáveis.
Ajusta uma GWR univariada de \(\mathbf{r}_j\) contra \(\mathbf{x}_j\).
Encontra o \(bw_j\) ótimo (via AICc) para esta variável específica.
Repete até que os coeficientes estabilizem.
\(bw_j\) Pequeno (Local): Processo altamente heterogêneo.
\(bw_j\) Grande (Global): Processo estacionário.
A MGWR produz modelos mais parcimoniosos (menor AICc) e reduz problemas de multicolinearidade local ao não forçar variáveis globais a variarem localmente (Oshan; Smith; Fotheringham, 2020).
Próximos Passos
Na Aula 06, veremos a parte prática deste conteúdo. Por favor, leia todo o Capítulo 4, com foco na aplicação e pacotes.
Referências Bibliográficas
ANSELIN, Luc. Spatial econometrics: methods and models. Kluwer Academic Publishers google schola, v. 2, p. 283–291, 1988.
ANSELIN, Luc. Local indicators of spatial association—LISA. Geographical analysis, v. 27, n. 2, p. 93–115, 1995.
ANSELIN, Luc. Spatial Econometrics. In: BALTAGI, Badi H. (Org.). A Companion to Theoretical Econometrics. Oxford: Blackwell Publishing, 2001. p. 310–330.
BESAG, Julian. Spatial interaction and the statistical analysis of lattice systems. Journal of the Royal Statistical Society: Series B (Methodological), v. 36, n. 2, p. 192–225, 1974.
BESAG, Julian; YORK, Jeremy; MOLLIÉ, Annie. Bayesian image restoration, with two applications in spatial statistics. Annals of the institute of statistical mathematics, v. 43, n. 1, p. 1–20, 1991.
CRESSIE, Noel. Statistics for spatial data. [S.l.]: John Wiley & Sons, 1993.
CRESSIE, Noel; CHAN, Ngai H. Spatial modeling of regional variables. Journal of the American Statistical Association, v. 84, n. 406, p. 393–401, 1989.
CRESSIE, Noel; MOORES, Matthew T. Spatial statistics. In: Encyclopedia of mathematical geosciences. [S.l.]: Springer, 2022. p. 1–11.
ELHORST, J. Paul et al. Spatial econometrics: from cross-sectional data to spatial panels. [S.l.]: Springer, 2014. v. 479
ELHORST, J. Paul. The dynamic general nesting spatial econometric model for spatial panels with common factors: Further raising the bar. Review of Regional Research, v. 42, n. 3, p. 249–267, 2022.
FOTHERINGHAM, A. Stewart; YANG, Wenbai; KANG, Wei. Multiscale Geographically Weighted Regression (MGWR). Annals of the American Association of Geographers, v. 107, n. 6, p. 1247–1265, 2017.
GUO, L.; MA, Z.; ZHANG, L. Comparison of bandwidth selection in application of geographically weighted regression: a case study. Canadian Journal of Forest Research, v. 38, n. 9, p. 2526–2534, 2008.
HALLECK VEGA, Solmaria; ELHORST, J. Paul. The SLX model. Journal of Regional Science, v. 55, n. 3, p. 339–363, 2015.
KEEFE, Matthew J.; FERREIRA, Marcelo A.; FRANCK, Christopher T. On the formal specification of sum-zero constrained intrinsic conditional autoregressive models. Spatial Statistics, v. 24, p. 54–65, 2018.
KELEJIAN, Harry; PIRAS, Gianfranco. Spatial econometrics. [S.l.]: Academic Press, 2017.
LESAGE, James P. Bayesian estimation of limited dependent variable spatial autoregressive models. Geographical Analysis, v. 32, n. 1, p. 19–35, 2000.
LESAGE, James; PACE, Robert Kelley. Introduction to spatial econometrics. [S.l.]: Chapman; Hall/CRC, 2009.
LU, Binbin et al. Geographically weighted regression with a non-Euclidean distance metric: a case study using hedonic house price data. International Journal of Geographical Information Science, v. 28, n. 4, p. 660–681, 2014.
MCMILLEN, Daniel P. Probit with spatial autocorrelation. Journal of Regional Science, v. 32, n. 3, p. 335–348, 1992.
OSHAN, Taylor M.; SMITH, James P.; FOTHERINGHAM, A. Stewart. Targeting the spatial context of obesity determinants via multiscale geographically weighted regression. International Journal of Health Geographics, v. 19, n. 1, p. 11, 2020.
RIEBLER, Andrea et al. An intuitive Bayesian spatial model for disease mapping that accounts for scaling. Statistical methods in medical research, v. 25, n. 4, p. 1145–1165, 2016.
YU, Hanchen et al. Inference in multiscale geographically weighted regression. Geographical Analysis, v. 52, n. 1, p. 87–106, 2020.
ZHANG, Xinyu; YU, Jihai. Spatial weights matrix selection and model averaging for spatial autoregressive models. Journal of Econometrics, v. 203, n. 1, p. 1–18, 2018.